Ray Tracing Renderer (Course Project)
Motivational Image
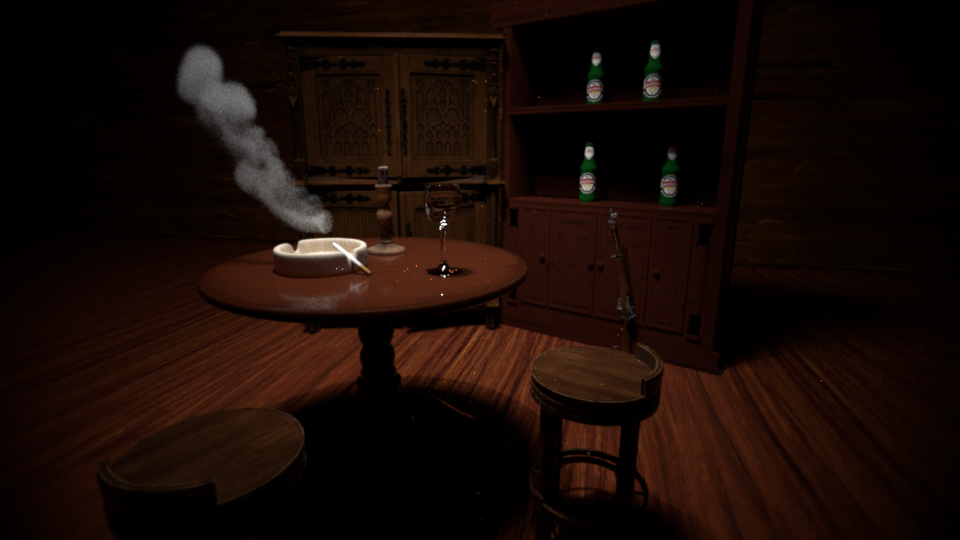
The scene that we want to render is a dimly lit, smoky bar, inspired by the following two images. Rows of exquisite liquor bottles line the shelves, their labels veiled in the subtle play of light and shadow. An ashtray rests nearby, adorned with an unlit cigarette. A dim spotlight bathes the ashtray and the wine bottles. The scene is to capture the essence of the bar's mystique, inviting participants to let their imagination run wild as they bring out the richness of the hidden stories within the rendering. The following two images are our motivation images.


Final Images
Based on the motivation images, we rendered our final images.
Features implemented
Images as Texture
Relevant Code
imagetexture.cpp
Implementation Details
To load the texture from external files, I used
stb_image to read the image data. I defined a
ImageData class similar to Bitmap class, which
is drived from Eigen::Array to store the image data. The
read image data is probably in sRGB color space. Therefore, we provide
an option boolean field raw in the img_texture
property to indicate whether use raw image color space or convert it to
linear color space with toLinearRGB() function. We also
provide two difference filter modes, nearest and
bilinear.
Validation
To validate the results, we used a texture from the website Reference: UV Map Grids and the scenes in assignment for rendering. The results look right. We also compared our results with mitsuba. Since the coordinate used in mitsuba is right-handed while nori's is left-handed, the up axis coordinate is inversed so that the scene representation is the same. The results are quite similar, while the results of mitsuba seem to be more vivid than ours. I think this may due to the usage of mipmap in mitsuba. The overall results are correct.






Normal Mapping
Relevant Code
mesh.hmesh.cppshape.hshape.cpp
Implementation Details
Normal mapping requires us to update the mesh normal with the normals
provided in the normal textures. Since the frame normal is calculated in
the setHitInformation() function in Shape, I
decided to read the normal map and update the normals here. I added a
field of type Texture<Color3f> m_normalMap. The
normal map can be loaded with the Image as Texture implemented before.
After reading the texture evaled value, it has to be converted to range
[-1, 1]. Currently, only Mesh supports computing shaing
frame with normal mapping. In the setHitInformation()
function in Mesh, the local normal read from the normal
mapping needs to be converted to the world normal using the local frame
first. However, if the default frame setup is used, the result is
discontinuous and is absolutely wrong. Therefore, I need to construct
the right local frame first. I followed the formula in learnopengl.
\[ \begin{bmatrix}T_{x}&T_{y}&T_{z}\\ B_{x}&B_{y}&B_{z}\end{bmatrix}=\frac{1}{\Delta U_{1}\Delta V_{2}-\Delta U_{2}\Delta V_{1}}\begin{bmatrix}\Delta V_{2}&-\Delta V_{1} \\ -\Delta U_{2} & \Delta U_{1} \end{bmatrix}\begin{bmatrix}E_{1x}&E_{1y}&E_{1z}\\ E_{2x}&E_{2y}&E_{2z}\end{bmatrix} \]
where \(E_{1}\) and \(E_{2}\) are two edges of the triangle, and
\(\Delta U, \Delta V\) are the
corresponding uv offsets of the edges. \(T\) and \(B\) is dpdv and
dpdu. Then, we can construct the local frame correctly with
dpdv and dpdu.
Validation
To validate the results, the results of nori are compared to the results of mitsuba.












Emitter (Spotlight) (5pt)
Relevant Code
spotlight.cpppath_mis.cppdirect_mis.cpp
Implementation Details
The implementation of the spotlight follows the mistuba designs. It
has three properties, intensity, maxAngle and
beamAngle. intensity is the max irridiance of
emitter at the center. All the ray emitted within the beamAngle has an
irridiance of intensity. The emitted intensity of the ray
begins to attenuate linearly between beamAngle and maxAngle. All the ray
outside maxAngle is evaluated to be zero, meaning no light
can be emitted in that direction. The FallOff function
calculates that attenuation giving the sampled outgoing light direction.
I also implemented the samplePhoton function in order to
apply spotlight in photon mapper. The sampled power is simply
I * falloff / pdf, following implementation in mitsuba. Pdf
of the sampled photon uses
Warp::squareToUniformSphereCapPdf(cosMaxAngle) since the
sampled ray can only exist in the cone area contrained by
maxAnlge.
One problem is that since the spotlight is a delta emitter, the
original implementation of multiple importance sampling does not work on
spotlight. So I added a flag isDeltaEmitter in
EmitterRecord. Everytime a delta emitter is sampled, the
weight of the emitter sampling should be 1 while weight of bsdf is 0. I
modified direct_mis and path_mis based on this
rule to fix the problem.
Validation
To validate the correctness of the spotlight and the modification on the integrator, I compared several rendered scenes in different integrator with mitsuba. The first scene is a simple floor with spotlight shooting from the above, rendered in direct integrator.


To validate the correctness in direct, path and photonmapper integrator, I put a spotlight in the cbox scene. The noise level may be slightly different from mitsuba, but the overall brightness is correct. This can successfully validate the correctness of spotlight






Stratified Sampling
Relevant Code
stratified.cpprender.cpp
Implementation Details
Stratified class is derived from Sampler
and implemented the stratified sampling. prepare() function
is used to initialize the sampler before start sampling. It is called
before the first sample starts. generate() function is used
to prepare for the sampling of the next image pixel.
advanced() function is called every time before the next
sampling starts. next1D and next2D is used to
retrieve the next 1d or 2d samples.
To enable sampling multiple dimensions, a dimensionIndex
is maintained in the class. Similarly, sampleIndex and
pixelIndex records the number of samples that are already
sampled and the number of pixels sampled. When a sample is needed, first
a seed will be calculated based on a permutation base seed, dimension
index and pixel index. The permutation sequences are thus the same for
all the samples with the same dimensionIndex and
pixelIndex, while different dimensionIndex and
pixelIndex will have different sequences. Then, the
position of the current sampled region is retrieved with
sampleIndex. Then a random offset is added according to
whether the sampled is jittered or not.
In the prepare() function, I initialize the
sampleIndex and the random number generators. A base
permutation seed is generated randomly. It can then be used to generate
a permuation sequence of size sampleCount.
generate() resets the dimension index and increment the
pixelIndex. advance resets the pixel index and increment
the sample index.
Validation
In th warptest, I visualize the results of the stratified sampler and grid sampler to show the difference between them. The result is shown below.


I also rendered a simple scene which consists of a plane and a sphere to see the actual effects of the stratified sampler. The result is shown below. The stratified sampler can reduce the noise level in .


Disney BSDF (metallic, specular, roughness, specular tint, clearcoat)
Relevant Code
disney.cppwarp.hwarp.cppwarptest.cpp
Implementation Details:
The disney BSDF is implemented based on the paper Physically-Based Shading at Disney. The code basically refers to the implementation of Disney BRDF explorer.
There are ten parameters in Disney BRDF. Five of them, metallic,
specular, roughness, specular tint and clearcoat graded. Disney BRDF is
consisted of three parts, which are diffuse, specular and clearcoat.
Diffuse is influenced by metallic and roughness. Specular is influenced
by specular, metallic, roughness and specular tint. Clearcoat is
influenced by clearcoat. (Only graded ones are listed here) The specular
and clearcoat are two microfacet models. The normal distribution of
specular is GGX (GTR2), and the normal distribution of clearcoat is
GTR1. The squareToGTR2(), squareToGTR1() and
their pdf uses the formula derived in the appendix of the paper. The pdf
are essentially the cosine weighted pdf of the normal distribution. The
eval() function follows exactly the same as BRDF explorer.
The choice of the sampling lobe refers to the implementation in
mitsuba.
Validation
The GTR1 and GTR2 are tested in the warptest. The results are shown below.




To validate the correctness of disney BSDF, I used the scene
cbox for test. For each test, only the parameter being
tested is changed, with all other graded parameters fixed and all other
ungraded parameters being 0. The results are shown below.
Metallic=0 vs Metallic=1


Roughness=0 vs Roughness=1


Specular=0.1 vs Specular=1


Specular tint=0 vs Specular tint=1


Clearcoat=0 vs Clearcoat=1


Progressive Photon Mapping
Relevant Code
progressivepm.cpp
Implementation Details
The implementation of progressive photon mapping is basically based on the paper Progressive Photon Mapping. The algorithm is consisted of two passes. In the first pass, we need to generate the visible hit points from the camera and store them. In the second pass, we need to generate the photon map repeated. After each photon map generation, we need to update the hit points with radius reduction and flux correction. A new rendered image can be generated right after eahc photon map generation process.
To make use of the current multiple thread rendering framework, the
execution process of the progressive photon mapper is a little different
from other integrators. In the process() function, we
iterate all the image pixels and shoot sampleCount rays and
perform path tracing for each ray and get the hit point on the diffuse
surfaces. I define a function persamplePreprocess(). This
function is called everytime a new sample starts. In this way, the
sampleCount defined in the sampler is actually
the number of photon map generation passes, while the actual number of
samples for each pixel is the sampleCount defined in the
progressive photon mapper. Then in the
persamplePreprocess() function, a new photon map is
generated. Then, a new image is rendered in Li() function.
Since now the pixel is needed to find the corresponding hit points
stored, a new parameter pixel is added to the
Li() function. First, the hit points information is updated
with the new photon map. Then, the image is rendered with the updated
hit points. Doing these two steps at the same time in Li()
function can make the best of the rendering framework to accelerate the
rendering process and is easy to implement even though it is a little
unintuitive.
Validation
To validate the progressive photon mapper, I rendered cbox with progressive photon mapper of 1 photon map generation pass and 1000 photon map generation passes. I also used the same setting on mitsuba for comparison. Even though the results are not exactly the same, it proves that the progressive photon mapper is converging to the correct results.
My results


Mistuba results

