Geometry Processing Project
- Implicit Surface Reconstruction
- Mesh Parameterization
- Shape Deformation
- Skinning and Skeletal Animation
Implicit Surface Reconstruction
- Compute an implicit MLS function approximating a 3D point cloud with given normals.
- Sample the implicit function on a 3D volumetric grid.
- Apply the marching cubes algorithm to extract a triangle mesh from the zero level set.
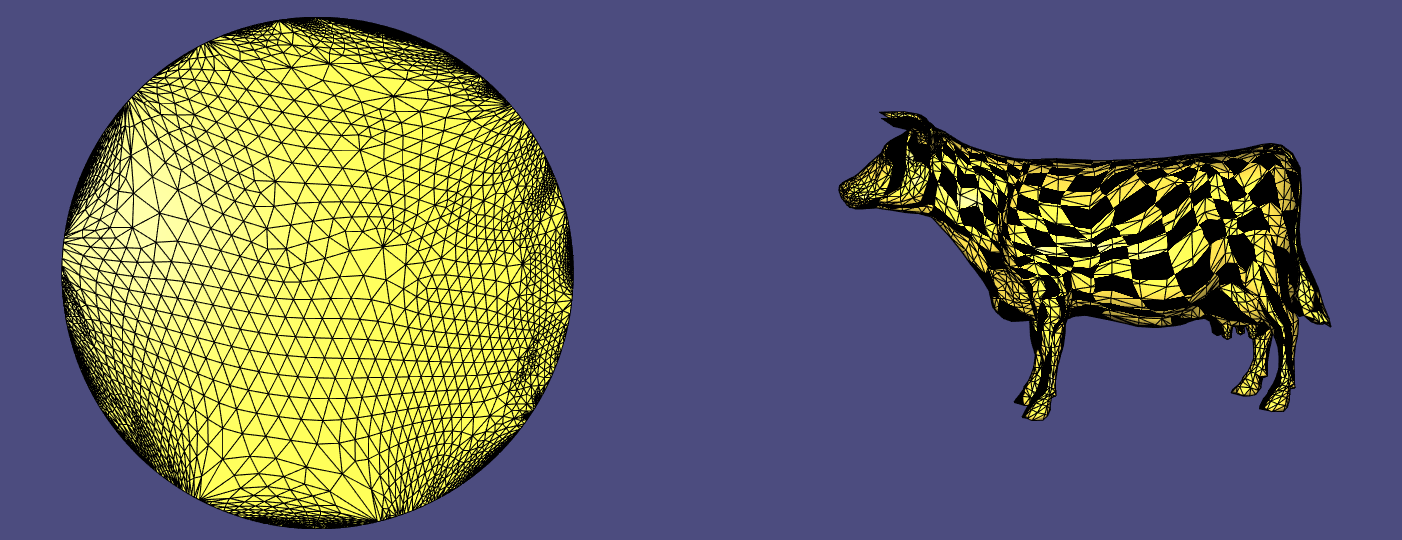
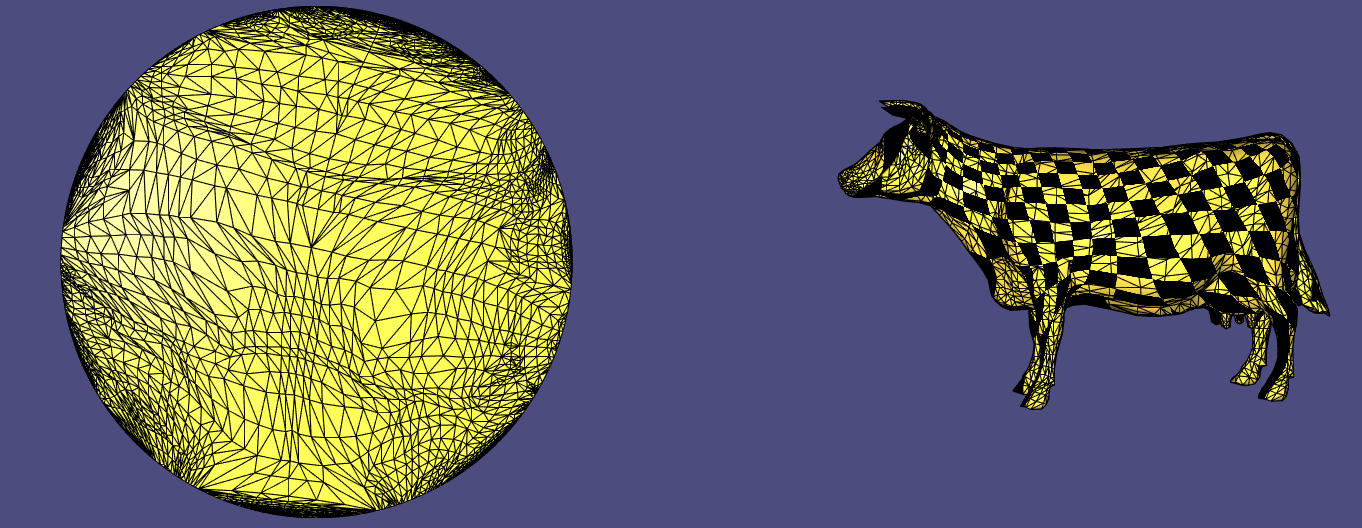
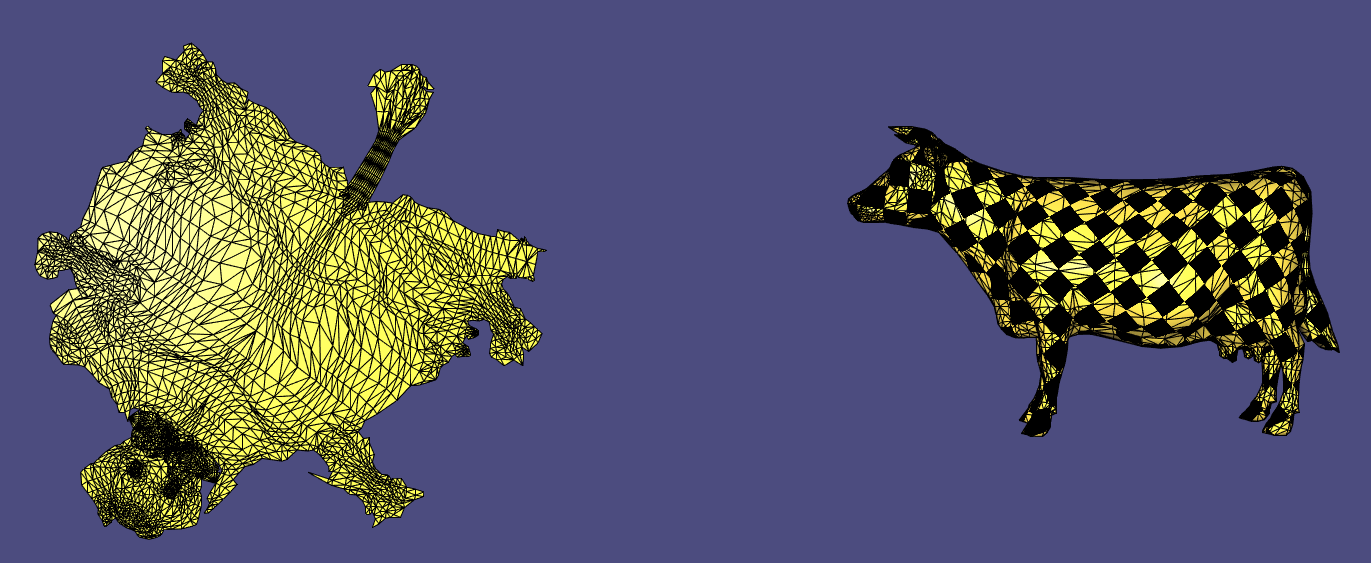
Mesh Parameterization
- Parameterize a mesh by minimizing four different distortion measures
with fixed or free boundaries.
- Spring energy (uniform Laplacian)
- Dirichlet/harmonic energy (cotangent Laplacian)
- Least Squares Conformal Maps (LSCM)
- As-Rigid-As-Possible (ARAP)
- Visualize the distortion by color coding.
Uniform and cotangent Laplacian
Spring energy is defined as \[ \frac{1}{2}k_{i,j}\Vert \mathbf{u}_{i}-\mathbf{u}_{j} \Vert^{2} \] Minimizing the spring enegy \[ \begin{align*} E(\mathbf{u}_{1}, \cdots, \mathbf{u}_{n})&=\sum\limits \frac{1}{2}k_{i,j}\Vert \mathbf{u}_{i}-\mathbf{u}_{j} \Vert^{2}\\ \frac{\partial{E(\mathbf{u}_{1},\cdots,\mathbf{u}_{n})}}{\partial \mathbf{u}_{i}}&=\sum\limits k_{i,j}(\mathbf{u}_{i}-\mathbf{u}_{j})=0 \\ \sum\limits_{j \in \mathcal{N}(i)\cap \mathcal{B}} k_{ij}\mathbf{u}_{i}+\sum\limits_{j \in \mathcal{N}(i) \backslash \mathcal{B}} k_{i,j}(\mathbf{u}_{i}-\mathbf{u}_{j})&= \sum\limits_{j \in \mathcal{N}(i)\cap \mathcal{B}} k_{i,j}\mathbf{u}_{j} \end{align*} \]
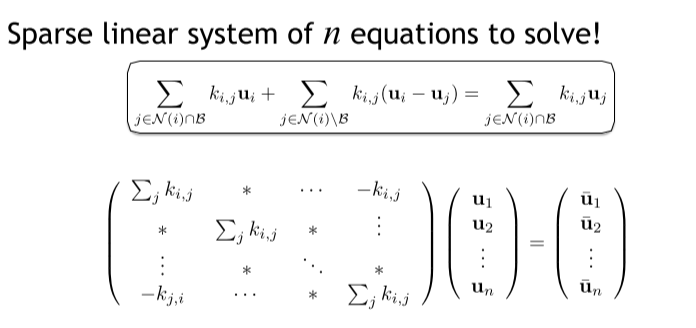
- Two choices of spring constants
- Uniform \(k_{i,j}=1\)
- Cotan \(k_{i,j}=\cot{\phi_{i,j}}+\cot{\phi_{j,i}}\)
LSCM
The LSCM distortion measure can be defined as \[ D(J) = \| J + J^T - (\text{tr}\, J) I \|_F^2 \]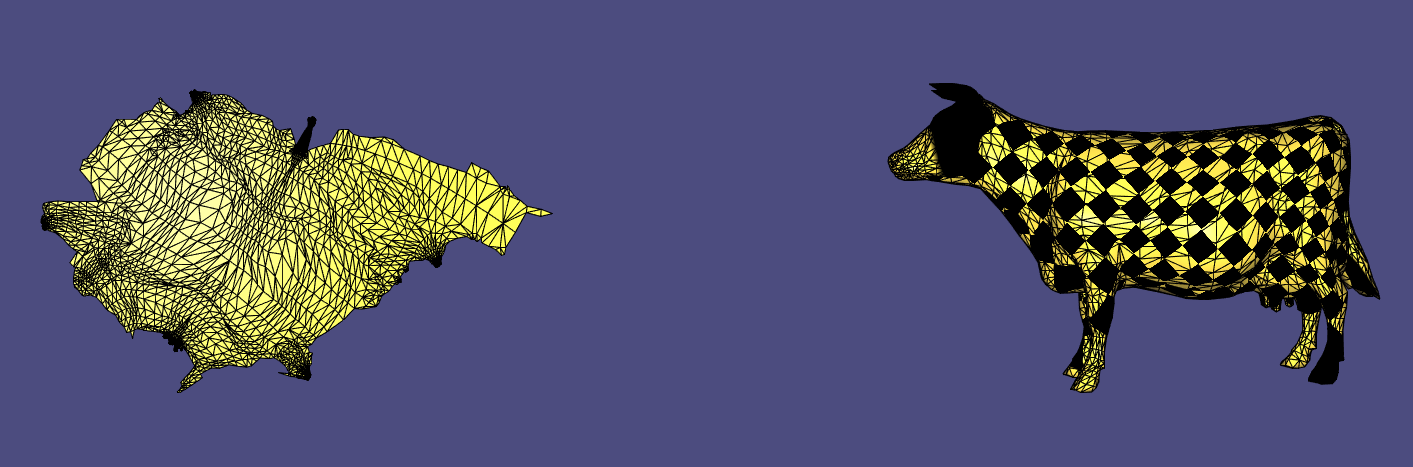
ARAP
The ARAP distortion is defined as \[ D(J) = \| J - R\|_F^2 \] where \(R\) is the cloest rotation matrix to \(J\). The ARAP procedure follows the steps below: - Local step: The Jacobians for each face of the current iterate are computed. Then for each Jacobian the closest rotation matrix is found. This can be done using the SVD of \(J\). - Global step: Then for each Jacobian the closest rotation matrix is found, they are all assumed to be fixed, and then minimize the ARAP distortion measure by solving a linear system.
Shape Deformation
Implement multiresolution mesh editing algorithm to interactively deform 3D models. Construct a two-level multi-resolution surface representation and use naive Laplacian editing to deform it.

Multiresolution mesh editing algorithm: 1. Remove high-frequency details by surface smoothing 2. Deform the smooth mesh 3. Transfer high-frequency details back to the deformed surface
Skinning and Skeletal Animation
Rotation Representation
| Representions | Short Description | pros | cons |
|---|---|---|---|
| rotation matrix | 3x3 Matrix to represent rotation in 3D | Simple to use directly. | Requires 9 elements to compute. Hard to interpolation. Direct interpolation leads to artifact. |
| euler angles | Use three angles (yaw, pitch, roll) to represent 3D representation | Only three parameters needed to represent rotations. Intuitive. Easy to transformed to rotation matrix | The gimbal lock problem. Can result in interpolation problems |
| axis angle | Rotation defined by an rotation axis and an angle | straightforward and intuitive, easily be converted to and from a matrix | Angle choices is not unique. Cannot perform interpolation directly |
| quaternions | Use a four-tuple of real number (x,y,z,w) | very efficient for interpolation. Without gimbal lock. Only 4 parameters required. | Less intuitive. more complex to transformed to rotation matrix. Double cover problem |
Harmonic skinning weights on selected handles
Handle selection
| shape name | joint 1 | joint 2 | joint 3 |
|---|---|---|---|
| hand |  |
 |
 |
Skinning weights visualization
| shape name | joint 1 | joint 2 | joint 3 |
|---|---|---|---|
| hand |  |
 |
 |
Skeletal animation
| Linear Blend Skinning | Dual Quaternion Skinning | per-face + averaging quaternions |
|---|---|---|
 |
 |
 |
Context-aware per-vertex LBS
| without context | with context |
|---|---|
 |
 |